飞机的AutoPilot模式
自动驾驶系统AFCS(AutoPilot Flight Control System),典型以Garmin的实现为例,即GFC700。它有很多的自动驾驶模式,即AP(AutoPilot Mode)。飞机自动驾驶的核心就是调整Elevator、Rudder、Aileron来实现飞机的Pitch和Roll的改变,从而达到垂直方向(vertical)上的上升下降,和水平方向(lateral)的转弯。GFC700里,ROL是水平默认模式,PIT是垂直默认模式。以CP的G5为例,如下图:

PIT
打开AP后的默认模式,是Pitch Attitude Hold意思,也就是保持飞机的pitch角度,默认角度为0,也就是保持飞机鼻子始终朝向水平。当触碰到设定高度时,就会自动转为ALT模式。
ALT
这个非常好理解,就是设置一个高度,让飞机始终保持这一高度飞行,所以叫Altitude Hold Mode. 当调整设置的高度,自动转成PIT模式,飞机自动上升或者下降到这一高度,再次转成ALT模式,hold高度。
VS
这个也好理解,就是Vertical Speed,单位是FPM,就是保持垂直方向,上升或者下降的速度,这个通常与ALT配合,即达到设定高度后,自动转为ALT模式。
FLC(IAS)
感觉叫IAS容易理解,就是Indicated Airspeed Hold模式,就是保持飞机的飞行速度不变,此时飞机可能上升,可能下降,加大油门,飞机就自动上升,收油门,飞机就下降。当触碰到设定高度时,就会自动转为ALT模式。
HDG
这个简单,就是飞机的鼻子一直朝向HDG设定的角度。
ROL
水平方向的默认模式。保持转弯的角度。
YD
全称为Yaw Damper。在三维坐标上,飞机就有三个角度,鼻子上下的pitch,身体翻滚的roll,和鼻子左右摇摆的yaw。yaw主要跟尾部的rudder有关,在转弯时,需要调整尾部的rudder,考虑到风的影响,为保证乘坐舒适,rudder的调整需要非常平滑,而安装的陀螺仪可以自动调节rudder角度,让转弯变得平滑,防止侧滑。很多的飞机在高度达到一定高度(比如200 feet)之后,就会自动开启YD模式,甚至取消了YD按钮,成为基本功能。由此YD成为附加模式,即可以与其他模式同时开启。
LVL
return to level的意思,这个按钮比较特别,通常是蓝色,作用也有点像紧急按钮,就是让飞机回到水平飞行状态,具体是两种控制的叠加,水平方向翅膀为水平,垂直方向飞机鼻子的Pitch为0度。开启LVL后,vertical的模式和lateral的模式都将不起作用,PFD的status box里两边都显示绿色的LVL,飞行员有时间思考下一步该怎么操作。
APR
当飞一个Approach准备降落时,就可以使用该模式。该模式很复杂,它包含了水平和垂直两个方向上的控制。水平方向上,飞机一定要在GPS或者跑道末端的localizer朝向的一定夹角范围内,通常这不是什么大问题,降落时,飞机鼻子总是沿着跑道方向的。而在垂直方向上,飞机也必须在一定高度范围内,即与信号发生装置形成一个角度,大约在2、3度左右,这在每个跑道的说明书里都有标注。当然也不能离跑道太远,通常20NM范围内,这样三方面都满足了,才能开启APR模式。
在面板上,通常APR的划分是在lateral模式里,即开启了APR,就不能开始HDG和NAV,但其实,APR是一种混合模式,可以简单理解为NAV模式叠加一个vertical控制。有些飞机,APR可以控制飞机实现自行着陆,但有些飞机在低于特定高度后就会自行关闭AP,而需要飞行员手动将飞机停到跑道上。
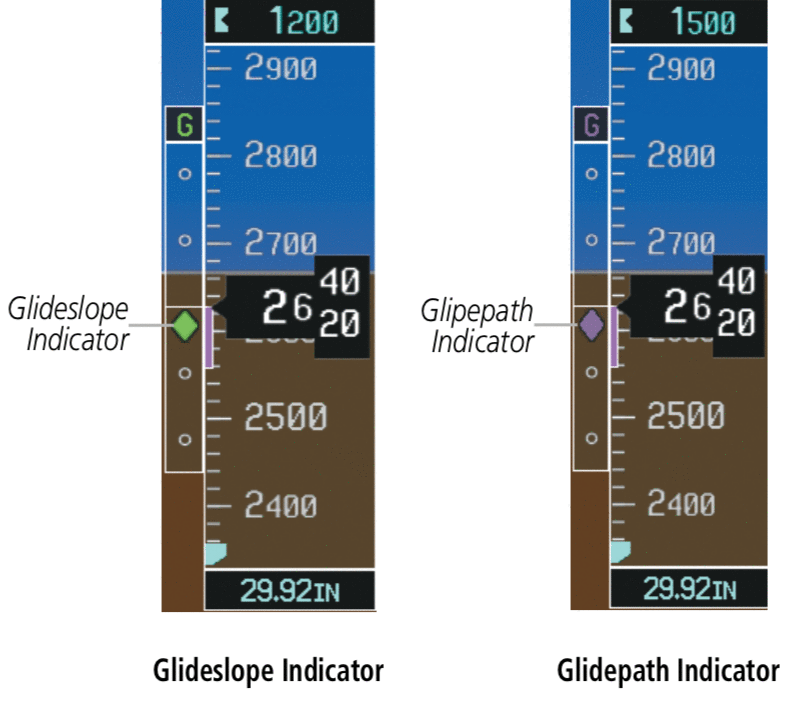
当CDI为GPS模式时,会有Glide Path引导降落,Glide Path是虚拟存在的,是结合卫星信号以及数据库里的测量数据,在空中计算出一个下降通道来引道飞机降落。当CDI为ILS时,会有Glide Slope引导降落,Glide Slope是在跑道附近有物理的发射天线,引导飞机按指定角度降落。无论哪种引导信号,在仪表盘上表现是差不多的,都是棱形保持在中间位置,就是此时降落过程中飞机的最佳高度值。
NAV
NAV就不是简单的模式了,它根据导航选择的信息不同,表现不同。比如CDI为GPS,当它抓到GPS信息,就会根据GPS的方向进行飞行;当CDI为Nav1/Nav2,这个时候就需要设置好目标waypoint的导航频率,当它抓取到导航无线电信息,就会按导航方向飞行,这些信号可能是VOR、LOC等各种设备的信号。不过,NAV也只是控制水平方向,不会自动调整高度,当需要调整高度降落,就需要切换成APR模式。
当按下NAV时,并不一定会马上生效,比如CDI为GPS时,会显示一个白色GPS在status box的左边,为armed状态,表示正在抓取信号,当抓取到信号后,GPS会显示为绿色,为captured状态,这个时候才表示NAV模式生效。

VNV
或者叫VNAV,其实就是垂直方向上的自动驾驶。比如下图中,在飞一个Approach时,会有一个下降的折线,FPL的右侧给了高度值,蓝色的是要求高度,白色为参考高度,上划线表示上限高度,下划线 为下限高度。VNV的profile里有下降角度FPA(Flight Path Angle),在开启VNV有一个条件,就是飞机在一个适合区域内,也就是与target waypoint的角度在一定范围内,如果没到,会显示TIME TO,如果过了,VNV就无法开启。如果我们手动操作,通常我们的下降角度在3度左右,太大可能导致速度上升太快,太小可能导致耗时太长或者失速。

BC
并不太常用的模式,它有点类似于APR。考虑到不同的机场,风的方向是不常变的,飞机迎风比较好降落,所以跑道的ILS设备总是对着风的方向安装。但有些地方风的方向会顺着季节变化,这个时候就需要飞机从跑道的另一端进行降落,为了省钱,就不会再安装一个ILS,而是在原来的ILS的反向再发射同样的引导信号,这就是所谓的Back Course,这个时候使用BC模式进行降落,其实就是告诉飞机,信号装置在跑道的靠近一端,而不是远离那端。

ATT
该模式不太常见,查了些资料,好像是源自直升机,全称为Attitude Retention Mode,即保持飞机的pitch和roll一段时间。
TOGA
自动起飞、复飞模式,简单理解就是油门到底,最快速度离开地面。在飞机起飞,或者是降落失败,需要立即复飞时使用。但由于是计算机根据风速自动计算最优参数,所以并不一定是油门到底,也不一定是推力最大。而且有些系统在该模式时,只是给出FD提示,比如Cessna,而并不介入操控,需要飞行员参照FD自行操控。
另外,TOGA按键并不跟其他AP模式一样在GMC面板上,而是一个单独的按钮,可能在PFD下方,摇杆上,或者是油门推杆的侧边,不同飞机不一样。
为了紧急情况下方便飞机员,TOGA按钮还会附带一些额外功能,比如当飞机miss approach之后,通常会进入SUSPEND状态,此时Flight Plan不会切换Leg,飞机会保持当前方向直飞,按下TOGA按钮会自动关闭SUSP状态。